




અલ્ટ્રા હાઇ પ્રિસિઝન MZM મોડ્યુલેટર બાયસ કંટ્રોલર ઓટોમેટિક બાયસ કંટ્રોલર


લક્ષણ
• પીક/નલ/Q+/Q− પર બાયસ વોલ્ટેજ નિયંત્રણ
• મનસ્વી બિંદુ પર બાયસ વોલ્ટેજ નિયંત્રણ
• અતિ ચોક્કસ નિયંત્રણ: નલ મોડ પર 50dB મહત્તમ લુપ્તતા ગુણોત્તર;
Q+ અને Q− મોડ્સ પર ±0.5◦ ચોકસાઈ
• ઓછું ડાયથર કંપનવિસ્તાર:
NULL મોડ અને PEAK મોડ પર 0.1% Vπ
Q+ મોડ અને Q− મોડ પર 2% Vπ
• ઉચ્ચ સ્થિરતા: સંપૂર્ણપણે ડિજિટલ અમલીકરણ સાથે
• લો પ્રોફાઇલ: ૪૦ મીમી (ડબલ્યુ) × ૩૦ મીમી (ડબલ્યુ) × ૧૦ મીમી (કલાક)
• વાપરવા માટે સરળ: મીની જમ્પર સાથે મેન્યુઅલ ઓપરેશન;
MCU UART2 દ્વારા લવચીક OEM કામગીરી
• બાયસ વોલ્ટેજ પ્રદાન કરવા માટે બે અલગ અલગ મોડ્સ: a. ઓટોમેટિક બાયસ કંટ્રોલ
b. વપરાશકર્તા દ્વારા નિર્ધારિત બાયસ વોલ્ટેજ

અરજી
• LiNbO3 અને અન્ય MZ મોડ્યુલેટર
• ડિજિટલ NRZ, RZ
• પલ્સ એપ્લિકેશન્સ
• બ્રિલૌઇન સ્કેટરિંગ સિસ્ટમ અને અન્ય ઓપ્ટિકલ સેન્સર
• CATV ટ્રાન્સમીટર
પ્રદર્શન
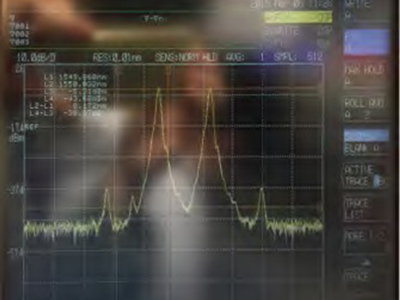
આકૃતિ 1. વાહક દમન
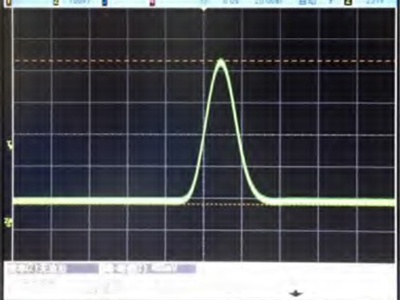
આકૃતિ 2. પલ્સ જનરેશન

આકૃતિ 3. મોડ્યુલેટર મહત્તમ શક્તિ
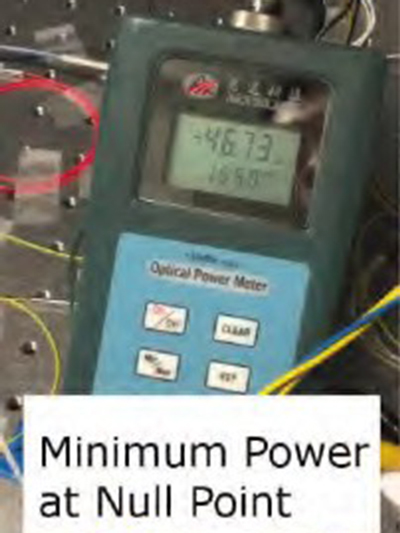
આકૃતિ 4. મોડ્યુલેટર ન્યૂનતમ શક્તિ
મેક્સિમ ડીસી લુપ્તતા ગુણોત્તર
આ પ્રયોગમાં, સિસ્ટમ પર કોઈ RF સિગ્નલ લાગુ કરવામાં આવ્યા ન હતા. શુદ્ધ DC એક્સટિંસિટન માપવામાં આવ્યું છે.
1. આકૃતિ 5 મોડ્યુલેટર આઉટપુટની ઓપ્ટિકલ પાવર દર્શાવે છે, જ્યારે મોડ્યુલેટરને પીક પોઈન્ટ પર નિયંત્રિત કરવામાં આવે છે. તે ડાયાગ્રામમાં 3.71dBm દર્શાવે છે.
2. આકૃતિ 6 માં મોડ્યુલેટર આઉટપુટની ઓપ્ટિકલ પાવર બતાવવામાં આવી છે, જ્યારે મોડ્યુલેટરને નલ પોઈન્ટ પર નિયંત્રિત કરવામાં આવે છે. તે આકૃતિમાં -46.73dBm દર્શાવે છે. વાસ્તવિક પ્રયોગમાં, મૂલ્ય -47dBm ની આસપાસ બદલાય છે; અને -46.73 એક સ્થિર મૂલ્ય છે.
3. તેથી, માપેલ સ્થિર DC લુપ્તતા ગુણોત્તર 50.4dB છે.
ઉચ્ચ લુપ્તતા ગુણોત્તર માટેની આવશ્યકતાઓ
1. સિસ્ટમ મોડ્યુલેટરમાં ઉચ્ચ લુપ્તતા ગુણોત્તર હોવો જોઈએ. સિસ્ટમ મોડ્યુલેટરની લાક્ષણિકતા નક્કી કરે છે કે મહત્તમ લુપ્તતા ગુણોત્તર પ્રાપ્ત કરી શકાય છે.
2. મોડ્યુલેટર ઇનપુટ લાઇટના ધ્રુવીકરણનું ધ્યાન રાખવું જોઈએ. મોડ્યુલેટર ધ્રુવીકરણ પ્રત્યે સંવેદનશીલ હોય છે. યોગ્ય ધ્રુવીકરણ 10dB થી વધુ લુપ્તતા ગુણોત્તરમાં સુધારો કરી શકે છે. પ્રયોગશાળાના પ્રયોગોમાં, સામાન્ય રીતે ધ્રુવીકરણ નિયંત્રકની જરૂર પડે છે.
૩. યોગ્ય બાયસ નિયંત્રકો. અમારા ડીસી લુપ્તતા ગુણોત્તર પ્રયોગમાં, ૫૦.૪dB લુપ્તતા ગુણોત્તર પ્રાપ્ત થયો છે. જ્યારે મોડ્યુલેટર ઉત્પાદનની ડેટાશીટમાં ફક્ત ૪૦dB ની યાદી છે. આ સુધારાનું કારણ એ છે કે કેટલાક મોડ્યુલેટર ખૂબ જ ઝડપથી ડ્રિફ્ટ થાય છે. રોફિયા R-BC-ANY બાયસ નિયંત્રકો ઝડપી પ્રતિસાદ સુનિશ્ચિત કરવા માટે દર ૧ સેકન્ડે બાયસ વોલ્ટેજ અપડેટ કરે છે.
વિશિષ્ટતાઓ
| પરિમાણ | ન્યૂનતમ | પ્રકાર | મહત્તમ | એકમ | શરતો |
| નિયંત્રણ કામગીરી | |||||
| લુપ્તતા ગુણોત્તર | મેર ૧ | 50 | dB | ||
| સીએસઓ2 | −55 | −65 | −૭૦ | ડીબીસી | ડિથર કંપનવિસ્તાર: 2%Vπ |
| સ્થિરીકરણ સમય | 4 | s | ટ્રેકિંગ પોઈન્ટ: નલ અને પીક | ||
| 10 | ટ્રેકિંગ પોઈન્ટ: Q+ અને Q- | ||||
| ઇલેક્ટ્રિકલ | |||||
| ધન પાવર વોલ્ટેજ | +૧૪.૫ | +૧૫ | +૧૫.૫ | V | |
| હકારાત્મક પાવર પ્રવાહ | 20 | 30 | mA | ||
| નકારાત્મક પાવર વોલ્ટેજ | -૧૫.૫ | -૧૫ | -૧૪.૫ | V | |
| નકારાત્મક પાવર પ્રવાહ | 2 | 4 | mA | ||
| આઉટપુટ વોલ્ટેજ રેન્જ | -૯.૫૭ | +૯.૮૫ | V | ||
| આઉટપુટ વોલ્ટેજ ચોકસાઇ | ૩૪૬ | µV | |||
| ડિથર ફ્રીક્વન્સી | ૯૯૯.૯૫ | ૧૦૦૦ | ૧૦૦૦.૦૫ | Hz | સંસ્કરણ: 1kHz ડાયથર સિગ્નલ |
| કંપનવિસ્તાર ઘટાડવો | ૦.૧% વીπ | V | ટ્રેકિંગ પોઈન્ટ: નલ અને પીક | ||
| ૨% વીπ | ટ્રેકિંગ પોઈન્ટ: Q+ અને Q- | ||||
| ઓપ્ટિકલ | |||||
| ઇનપુટ ઓપ્ટિકલ પાવર3 | -30 | -5 | ડીબીએમ | ||
| ઇનપુટ તરંગલંબાઇ | ૭૮૦ | ૨૦૦૦ | nm | ||
1. MER એ મોડ્યુલેટર એક્સ્ટીંક્શન રેશિયોનો ઉલ્લેખ કરે છે. પ્રાપ્ત થયેલ એક્સ્ટીંશન રેશિયો સામાન્ય રીતે મોડ્યુલેટર ડેટાશીટમાં ઉલ્લેખિત મોડ્યુલેટરનો એક્સ્ટીંશન રેશિયો હોય છે.
2. CSO એ સંયુક્ત બીજા ક્રમનો સંદર્ભ આપે છે. CSO ને યોગ્ય રીતે માપવા માટે, RF સિગ્નલ, મોડ્યુલેટર અને રીસીવરોની રેખીય ગુણવત્તા સુનિશ્ચિત કરવી જોઈએ. વધુમાં, વિવિધ RF ફ્રીક્વન્સીઝ પર ચાલતી વખતે સિસ્ટમ CSO રીડિંગ્સ બદલાઈ શકે છે.
3. કૃપા કરીને નોંધ લો કે ઇનપુટ ઓપ્ટિકલ પાવર પસંદ કરેલા બાયસ પોઈન્ટ પર ઓપ્ટિકલ પાવરને અનુરૂપ નથી. તે મહત્તમ ઓપ્ટિકલ પાવરનો ઉલ્લેખ કરે છે જે મોડ્યુલેટર કંટ્રોલરને નિકાસ કરી શકે છે જ્યારે બાયસ વોલ્ટેજ −Vπ થી +Vπ સુધીની હોય છે.
વપરાશકર્તા ઈન્ટરફેસ
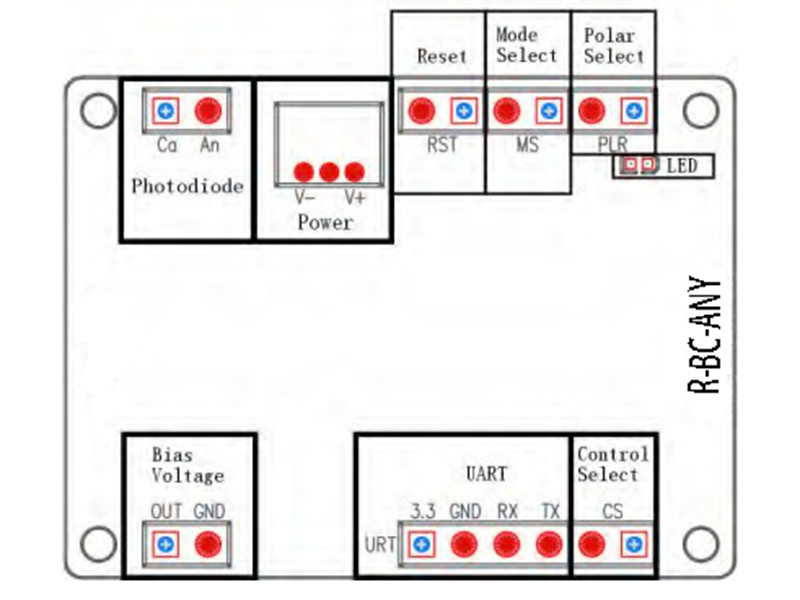
આકૃતિ 5. એસેમ્બલી
| જૂથ | ઓપરેશન | સમજૂતી |
| ફોટોડાયોડ ૧ | પીડી: MZM ફોટોડાયોડના કેથોડને કનેક્ટ કરો | ફોટોકરન્ટ પ્રતિસાદ આપો |
| GND: MZM ફોટોડાયોડના એનોડને કનેક્ટ કરો | ||
| શક્તિ | બાયસ કંટ્રોલર માટે પાવર સ્ત્રોત | V-: નકારાત્મક ઇલેક્ટ્રોડને જોડે છે |
| V+: ધન ઇલેક્ટ્રોડને જોડે છે | ||
| મધ્ય ચકાસણી: ગ્રાઉન્ડ ઇલેક્ટ્રોડને જોડે છે | ||
| રીસેટ | જમ્પર દાખલ કરો અને 1 સેકન્ડ પછી બહાર કાઢો | નિયંત્રક રીસેટ કરો |
| મોડ પસંદ કરો | જમ્પર દાખલ કરો અથવા બહાર કાઢો | જમ્પર વગર: નલ મોડ; જમ્પર સાથે: ક્વાડ મોડ |
| ધ્રુવીય પસંદગી2 | જમ્પર દાખલ કરો અથવા બહાર કાઢો | જમ્પર વગર: પોઝિટિવ પોલર; જમ્પર સાથે: નેગેટિવ પોલર |
| બાયસ વોલ્ટેજ | MZM બાયસ વોલ્ટેજ પોર્ટ સાથે કનેક્ટ કરો | OUT અને GND મોડ્યુલેટર માટે બાયસ વોલ્ટેજ પૂરા પાડે છે |
| એલ.ઈ.ડી. | સતત ચાલુ | સ્થિર સ્થિતિમાં કામ કરવું |
| દર 0.2 સેકન્ડે ચાલુ-બંધ અથવા બંધ-ઑન | ડેટા પ્રોસેસિંગ અને કંટ્રોલિંગ પોઈન્ટ શોધવું | |
| દર 1 સેકન્ડે ચાલુ-બંધ અથવા બંધ-ઑન | ઇનપુટ ઓપ્ટિકલ પાવર ખૂબ જ ઓછો છે. | |
| દર 3 સેકન્ડે ચાલુ-બંધ અથવા બંધ-ઑન | ઇનપુટ ઓપ્ટિકલ પાવર ખૂબ મજબૂત છે. | |
| યુએઆરટી | UART દ્વારા નિયંત્રક ચલાવો | ૩.૩: ૩.૩V સંદર્ભ વોલ્ટેજ |
| GND: જમીન | ||
| RX: કંટ્રોલરનું રિસીવ | ||
| TX: નિયંત્રકનું ટ્રાન્સમિટ | ||
| નિયંત્રણ પસંદગી | જમ્પર દાખલ કરો અથવા બહાર કાઢો | જમ્પર વગર: જમ્પર નિયંત્રણ; જમ્પર સાથે: UART નિયંત્રણ |
1. કેટલાક MZ મોડ્યુલેટરમાં આંતરિક ફોટોડાયોડ હોય છે. કંટ્રોલર સેટઅપ કંટ્રોલરના ફોટોડાયોડનો ઉપયોગ અથવા મોડ્યુલેટરના આંતરિક ફોટોડાયોડનો ઉપયોગ વચ્ચે પસંદ કરવું જોઈએ. બે કારણોસર લેબ પ્રયોગો માટે કંટ્રોલરના ફોટોડાયોડનો ઉપયોગ કરવાની ભલામણ કરવામાં આવે છે. પ્રથમ, કંટ્રોલર ફોટોડાયોડે ગુણવત્તા સુનિશ્ચિત કરી છે. બીજું, ઇનપુટ લાઇટ ઇન્ટેન્સિટીને સમાયોજિત કરવાનું સરળ છે. નોંધ: જો મોડ્યુલેટરના આંતરિક ફોટોડાયોડનો ઉપયોગ કરી રહ્યા છો, તો કૃપા કરીને ખાતરી કરો કે ફોટોડાયોડનો આઉટપુટ કરંટ ઇનપુટ પાવરના સખત પ્રમાણસર છે.
2. પોલાર પિનનો ઉપયોગ નલ કંટ્રોલ મોડ (મોડ સિલેક્ટ પિન દ્વારા નક્કી) અથવા ક્વાડ+ માં પીક અને નલ વચ્ચે નિયંત્રણ બિંદુને સ્વિચ કરવા માટે થાય છે.
અને ક્વાડ- ક્વાડ કંટ્રોલ મોડમાં. જો પોલાર પિનનો જમ્પર દાખલ કરવામાં ન આવે, તો કંટ્રોલ પોઈન્ટ નલ મોડમાં નલ અથવા ક્વાડ મોડમાં ક્વાડ+ હશે. RF સિસ્ટમનું એમ્પ્લીટ્યુડ પણ કંટ્રોલ પોઈન્ટને અસર કરશે. જ્યારે કોઈ RF સિગ્નલ ન હોય અથવા RF સિગ્નલ એમ્પ્લીટ્યુડ નાનું હોય, ત્યારે કંટ્રોલર MS અને PLR જમ્પર દ્વારા પસંદ કરેલા કાર્ય બિંદુને યોગ્ય બિંદુ પર લોક કરી શકે છે. જ્યારે RF સિગ્નલ એમ્પ્લીટ્યુડ ચોક્કસ થ્રેશોલ્ડ કરતાં વધી જાય, ત્યારે સિસ્ટમનો પોલાર બદલાશે, આ કિસ્સામાં, PLR હેડર વિરુદ્ધ સ્થિતિમાં હોવો જોઈએ, એટલે કે જો જમ્પર દાખલ ન હોય તો તેને દાખલ કરવું જોઈએ અથવા જો તે દાખલ કરવામાં આવે તો તેને બહાર કાઢવું જોઈએ.
લાક્ષણિક એપ્લિકેશન
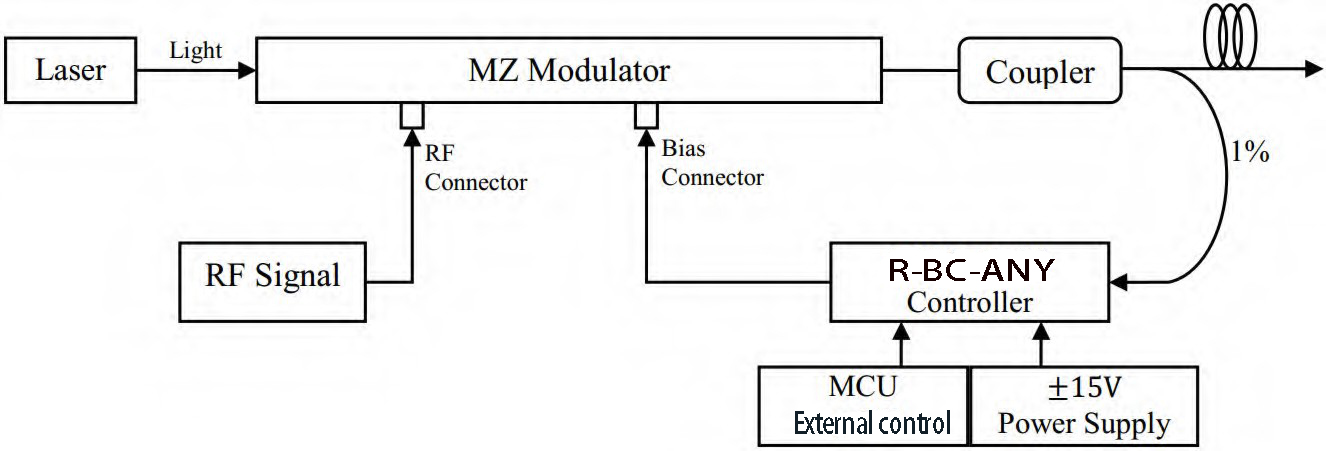
કંટ્રોલર વાપરવા માટે સરળ છે.
પગલું 1. કપ્લરના 1% પોર્ટને કંટ્રોલરના ફોટોડાયોડ સાથે જોડો.
પગલું 2. કંટ્રોલરના બાયસ વોલ્ટેજ આઉટપુટ (SMA અથવા 2.54mm 2-પિન હેડર દ્વારા) ને મોડ્યુલેટરના બાયસ પોર્ટ સાથે જોડો.
પગલું 3. +15V અને -15V DC વોલ્ટેજ સાથે કંટ્રોલર પ્રદાન કરો.
પગલું 4. કંટ્રોલર રીસેટ કરો અને તે કામ કરવાનું શરૂ કરશે.
નોંધ: કંટ્રોલર રીસેટ કરતા પહેલા કૃપા કરીને ખાતરી કરો કે સમગ્ર સિસ્ટમનો RF સિગ્નલ ચાલુ છે.
રોફિયા ઓપ્ટોઇલેક્ટ્રોનિક્સ કોમર્શિયલ ઇલેક્ટ્રો-ઓપ્ટિક મોડ્યુલેટર્સ, ફેઝ મોડ્યુલેટર્સ, ઇન્ટેન્સિટી મોડ્યુલેટર, ફોટોડિટેક્ટર્સ, લેસર લાઇટ સોર્સ, ડીએફબી લેસર્સ, ઓપ્ટિકલ એમ્પ્લીફાયર્સ, ઇડીએફએ, એસએલડી લેસર, ક્યુપીએસકે મોડ્યુલેશન, પલ્સ લેસર, લાઇટ ડિટેક્ટર, બેલેન્સ્ડ ફોટોડિટેક્ટર, લેસર ડ્રાઇવર, ફાઇબર ઓપ્ટિક એમ્પ્લીફાયર, ઓપ્ટિકલ પાવર મીટર, બ્રોડબેન્ડ લેસર, ટ્યુનેબલ લેસર, ઓપ્ટિકલ ડિટેક્ટર, લેસર ડાયોડ ડ્રાઇવર, ફાઇબર એમ્પ્લીફાયરની પ્રોડક્ટ લાઇન ઓફર કરે છે. અમે કસ્ટમાઇઝેશન માટે ઘણા ચોક્કસ મોડ્યુલેટર્સ પણ પ્રદાન કરીએ છીએ, જેમ કે 1*4 એરે ફેઝ મોડ્યુલેટર્સ, અલ્ટ્રા-લો વીપીઆઇ અને અલ્ટ્રા-હાઇ લુપ્તતા રેશિયો મોડ્યુલેટર્સ, જેનો ઉપયોગ મુખ્યત્વે યુનિવર્સિટીઓ અને સંસ્થાઓમાં થાય છે.
આશા છે કે અમારા ઉત્પાદનો તમને અને તમારા સંશોધન માટે મદદરૂપ થશે.


